Линия очерчивающая профиль зуба это
Опубликовано: 24.07.2024
Эвольвентным зубчатым колесом называют звено зубчатого механизма, снабженное замкнутой системой зубьев. При проектировании зубчатого колеса вначале нужно определить его число зубьев z , а затем определить параметры зубьев. Для этого нужно произвольную окружность колеса r y разделить на z частей, каждая из которых называется окружным шагом p y .
где m y = p y / p = d y / z - модуль зацепления по окружности произвольного радиуса.
Модулем зацепления называется линейная величина в p раз меньшая окружного шага или отношение шага по любой концентрической окружности зубчатого колеса к p . В зависимости от окружности по которой определен модуль различают делительный, основной, начальный. Для косозубых колес еще и нормальный, торцевой и осевой модули. В ряде стран используется величина обратная модулю, которая называется питчем. Питч (диаметральный) - число зубьев колеса, приходящееся на дюйм диаметра. Исходя из этого модуль можно определить как число милиметров диаметра, приходящееся на один зуб. На колесе можно провести бесчисленное число окружностей на каждой из которых будет свой модуль. Для ограничения этого числа ГОСТом введен стандартный ряд модулей. Стандартной модуль определяется по окружности называемой делительной. Точнее делительной называется такая окружность зубчатого колеса, на которой модуль и шаг принимают стандартное значение. Окружным шагом или шагом называется расстояние по дуге окружности между одноименными точками профилей соседних зубьев (под одноименными понимаются правые или левые профили зуба). Угловой шаг t - центральный угол соответствующий дуге p - окружному шагу по делительной окружности.
Примечание: Согласно ГОСТ основные элементы зубчатого колеса обозначаются по следующим правилам: линейные величины - строчными буквами латинского алфавита, угловые - греческими буками; установлены индексы для величин :
по окружностям: делительной - без индекса, вершин - a , впадин - f , основная - b , начальная - w , нижних точек активных профилей колес - p , граничных точек - l ;
по сечениям: нормальное сечение - n , торцевое сечение - t , осевое сечение - x ;
относящихся к зуборезному инструменту - 0 .
Для параметров зубчатого колеса справедливы следующие соотношения
- диаметр окружности произвольного радиуса,
- диаметр делительной окружности,
- шаг по окружности произвольного радиуса,
- шаг по делительной окружности,
где a - угол профиля на делительной окружности,
a y - угол профиля на окружности произвольного радиуса.
Углом профиля называется острый угол между касательной к профилю в данной точки и радиусом - вектором, проведенным в данную точку из центра колеса.
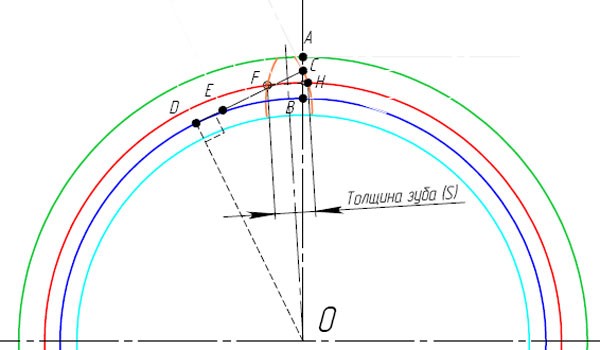
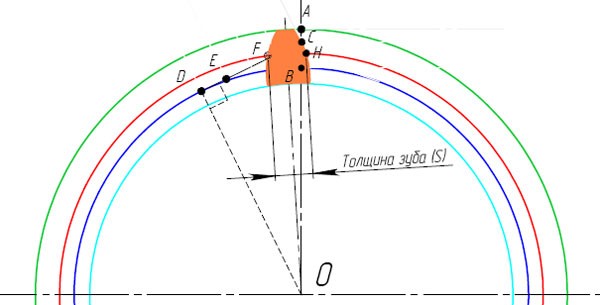
Шаг колеса делится на толщину зуба s y и ширину впадины e y . Толщина зуба s y - расстояние по дуге окружности r y между разноименными точками профилей зуба. Ширина впадины e y - расстояние по дуге окружности r y между разноименными точками профилей соседних зубьев.
На основной окружности a b => 0 и cos a b => 1 , тогда
В зависимости от соотношения между толщиной зуба и шириной впадины на делительной окружности зубчатые колеса делятся на:
нулевые s = e = p * m / 2 , D = 0;
положительные s > e , => D > 0;
отрицательные s D D - коэффициент изменения толщины зуба (отношение приращения толщины зуба к модулю). Тогда толщину зуба по делительной окружности можно записать
Более подробно познакомиться с основными определениями и расчетными зависимостями можно в литературе [ 11.1 ] и в ГОСТ 16530-83.
Толщина зуба колеса по окружности произвольного радиуса .
Толщина зуба по дуге делительной окружности
Угловая толщина зуба по окружности произвольного радиуса из схемы на рис. 12.2
Подставляя в формулу угловой толщины эти зависимости, получим
Методы изготовления эвольвентных зубчатых колес .
Существует множество вариантов изготовления зубчатых колес. В их основу положены два принципиально отличных метода:
метод копирования, при котором рабочие кромки инструмента по форме соответствуют обрабатываемой поверхности ( конгруентны ей, т. е. заполняют эту поверхность как отливка заполняет форму );
метод огибания, при котором инструмент и заготовка за счет кинематической цепи станка выполняют два движения - резания и огибания (под огибанием понимается такое относительное движение заготовки и инструмента , которое соответствует станочному зацеплению , т. е. зацеплению инструмента и заготовки с требуемым законом изменения передаточного отношения).
Из вариантов изготовления по способу копирования можно отметить:
Нарезание зубчатого колеса профилированной дисковой или пальцевой фрезой (проекция режущих кромок которой соответствует конфигурации впадин). При этом методе резание производится в следующем прядке: прорезается впадина первого зуба, затем заготовка с помощью делительного устройства (делительной головки) поворачивается на угловой шаг и прорезается следующая впадина. Операции повторяются пока не будут прорезаны все впадины. Производительность данного способа низкая, точность и качество поверхности невысокие.
Отливка зубчатого колеса в форму. При этом внутренняя поверхность литейной формы конгруентна наружной поверхности зубчатого колеса. Производительность и точность метода высокая, однако при этом нельзя получить высокой прочности и твердости зубьев.
Из вариантов изготовления по способу огибания наибольшее распространение имеют:
Обработка на зубофрезерных или зубодолбежных станках червячными фрезами или долбяками. Производительность достаточно высокая, точность изготовления и чистота поверхностей средняя. Можно обрабатывать колеса из материалов с невысокой твердостью поверхности.
Накатка зубьев с помощью специального профилированного инструмента. Обеспечивает высокую производительность и хорошую чистоту поверхности. Применяется для пластичных материалов, обычно на этапах черновой обработки. Недостаток метода образование наклепанного поверхностного слоя, который после окончания обработки изменяет свои размеры.
Обработка на зубошлифовальных станках дисковыми кругами. Применяемся как окончательная операция после зубонарезания (или накатки зубьев) и термической обработки. Обеспечивает высокую точность и чистоту поверхности. Применяется для материалов с высокой поверхностной прочностью.
Понятие о исходном, исходном производящем и производящем контурах .
Для сокращения номенклатуры режущего инструмента стандарт устанавливает нормативный ряд модулей и определенные соотношения между размерами элементов зуба. Эти соотношения определяются:
для зубчатых колес определяются параметрами исходной рейки через параметры ее нормального сечения - исходный контур;
для зубчатого инструмента определяются параметрами исходной производящей рейки через параметры ее нормального сечения - исходный производящий контур.
По ГОСТ 13755-81 значения параметров исходного контура должны быть следующими:
угол главного профиля a = 20 ° ;
коэффициент высоты зуба h * a = 1 ;
коэффициент высоты ножки h * f = 1.25 ;
коэффициент граничной высоты h * l = 2 ;
коэффициент радиуса кривизны переходной кривой r * f =с * /(1-sin a )= 0.38 ;
коэффициент радиального зазора в паре исходных контуров с * = 0.25.
Исходный производящий контур отличается от исходного высотой зуба h 0 = 2.5m.
Исходный и исходный производящий контуры образуют между собой конруентную пару (рис. 12.3), т.е. один заполняет другой как отливка заполняет заготовку (с радиальным зазором с * Ч m в зоне прямой вершин зуба исходной рейки). Принципиальное отличие этих контуров в том, что исходный контур положен в основу стандартизации зубчатых колес, а исходный производящий - в основу стандартизации зуборезного инструмента. Оба эти контура необходимо отличать от производящего контура - проекции режущих кромок инструмента на плоскость перпендикулярную оси заготовки.
Станочное зацепление .
Станочным зацеплением называется зацепление, образованное заготовкой колеса и инструментом, при изготовлении зубчатого колеса на зубообрабатывающем оборудовании по способу обката. Схема станочного зацепления колеса и инструмента с производящим контуром, совпадающим с исходным производящим контуром, изображена на рис. 12.4.
Линия станочного зацепления - геометрическое место точек контакта эвольвентной части профиля инструмента и эвольвентной части профиля зуба в неподвижной системе координат.
Смещение исходного производящего контура x*m - кратчайшее расстояние между делительной окружностью заготовки и делительной прямой исходного производящего контура.
Уравнительное смещение D y*m - условная расчетная величина, введенная в расчет геометрии зацепления с целью обеспечения стандартного радиального зазора в зацеплении (величина, выражающая в долях модуля уменьшение радиуса окружностей вершин колес, необходимое для обеспечения стандартной величины радиального зазора).
Окружность граничных точек r l - окружность проходящая через точки сопряжения эвольвентной части профиля зуба с переходной кривой.
Основные размеры зубчатого колеса .
Определим основные размеры эвольвентного зубчатого колеса, используя схему станочного зацепления (рис. 12.4).
Радиус окружности вершин
Радиус окружности впадин
Толщина зуба по делительной окружности.
Так как стночно-начальная прямая перекатывается в процессе огибания по делительной окружности без скольжения, то дуга s-s по делительной окружности колеса равна ширине впадины e-e по станочно-начальной прямой инструмента. Тогда, c учетом схемы на рис. 12.5, можно записать
Виды зубчатых колес (Классификация по величине смещения) .
В зависимости от расположения исходного производящего контура относительно заготовки зубчатого колеса, зубчатые колеса делятся на нулевые или без смещения, положительные или с положительным смещением, отрицательные или с отрицательным смещением.
Подрезание и заострение зубчатого колеса .
Если при нарезании зубчатого колеса увеличивать смещение, то основная и делительная окружность не изменяют своего размера, а окружности вершин и впадин увеличиваются. При этом участок эвольвенты, который используется для профиля зуба, увеличивает свой радиус кривизны и профильный угол. Толщина зуба по делительной окружности увеличивается , а по окружности вершин уменьшается.
На рис. 12.7 изображены два эвольвентных зуба для которых
Для термобработанных зубчатых колес с высокой поверхностной прочностью зуба заострение вершины зуба является нежелательным. Термообработка зубьев (азотирова-ние, цементация, цианирование), обеспечивающая высо Рис. 12.7 кую поверхностную прочность и твердость зубьев при сохранении вязкой серцевины, осуществляется за счет насыщения поверхностных слоев углеродом. Вершины зубьев, как выступающие элементы колеса, насыщаются углеродом больше. Поэтому после закалки они становятся более твердыми и хрупкими. У заостренных зубьев появляется склонность к скалыванию зубьев на вершинах. Поэтому рекомендуется при изготовлении не допускать толщин зубьев меньших некоторых допустимых значений. То есть заостренным считается зуб у которого
При этом удобнее пользоваться относительными величинами [s a /m ]. Обычно принимают следующие допустимые значения
улучшение, нормализация [s a /m ] = 0.2;
цианирование, азотирование [s a /m ] = 0.25. 0.3;
цементация [s a /m ] = 0.35. 0.4.
Подрезание эвольвентных зубьев в станочном зацеплении
В процессе формирования эвольвентного зуба по способу огибания, в зависимости от взаимного расположения инструмента и заготовки возможно срезание эвольвентной части профиля зуба той частью профиля инструмента, которая формирует переходную кривую. Условие при котором это возможно определяется из схемы станочного зацепления. Участок линии зацепления, соответствующий эвольвентному зацеплению определяется отрезком B 1 . где точка B l определяется пересечением линии станочного зацепления и прямой граничных точек инструмента. Если точка B l располагается ниже (см. рис.12.8) точки N , то возникает подрезание зуба. Условие при котором нет подрезания можно записать так
| УГОЛОК ПОСЕТИТЕЛЯ | Журнал САПР | ВСЕ ВИДЕОУРОКИ |

| Урок №30. Построение эвольвенты зубчатого колеса (упрощенный способ) |
| Автор: Петр Марценюк |
| 29.11.2009 14:05 |
|
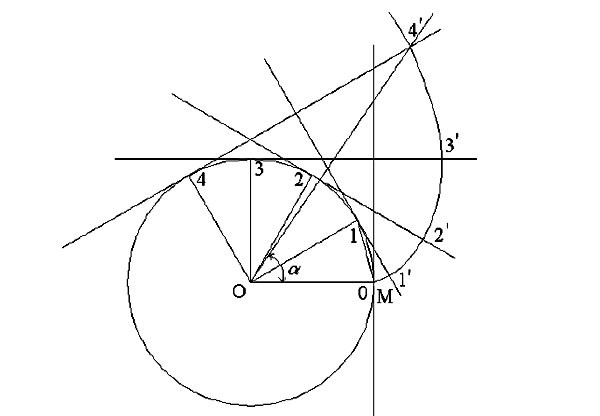
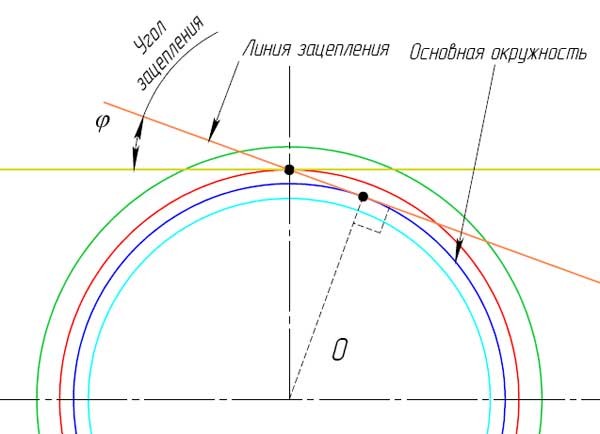
Урок посвящен построению зубчатого колеса с эвольвентным профилем зуба. Урок состоит из двух частей. В первой части выложена теория, формулы для расчета и один из способов графического построения эвольвентного профиля зуба. Часто задаваемые вопросы: *Что такое эвольвента (эволюта)? Итак, начнем с теории. Эвольвентное зацепление позволяет передавать движение с постоянным передаточным отношением. Эвольвентное зацепление - зубчатое зацепление, в котором профили зубьев очерчены по эвольвенте окружности.
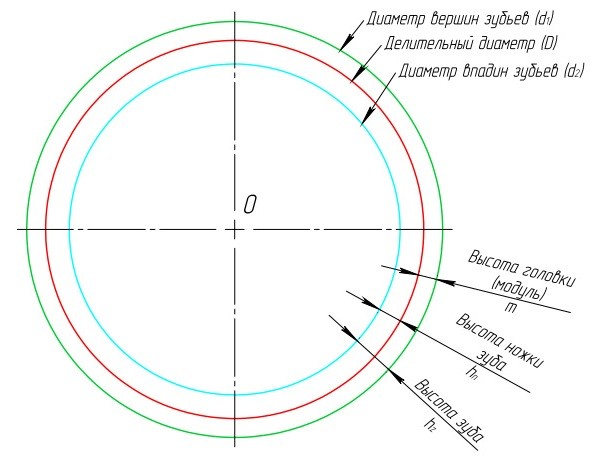
Параметры зубчатых колёсОсновной теореме зацепления удовлетворяют различные кривые, в том числе эвольвента и окружность, по которым чаще всего изготавливают профили зубьев зубчатого колеса. В случае, если профиль зуба выполнен по эвольвенте, передача называется эвольвентной. Для передачи больших усилий с помощью зубчатых механизмов используют зацепление Новикова, в котором профиль зуба выполнен по окружности. Окружности, которые катятся в зацеплении без скольжения друг по другу, называются начальными (D). Окружности, огибающие головки зубьев зубчатых колёс, называются окружностями головок (d1). Окружности, огибающие ножки зубьев зубчатых колёс, называются окружностями ножек (d2). Окружности, по которым катятся прямые, образующие эвольвенты зубьев первого и второго колёс, называются основными окружностями. Окружность, которая делит зуб на головку и ножку, называется делительной окружностью (D). Для нулевых (некорригированных) колёс начальная и делительная окружности совпадают. Расстояние между одноимёнными точками двух соседних профилей зубьев зубчатого колеса называется шагом по соответствующей окружности. Шаг можно определить по любой из пяти окружностей. Чаще всего используют делительный шаг p =2
Модуль зубчатого колеса, геометрический параметр зубчатых колёс. Для прямозубых цилиндрических зубчатых колёс модуль m равен отношению диаметра делительной окружности (D) к числу зубьев z или отношению шага p к числу "пи"
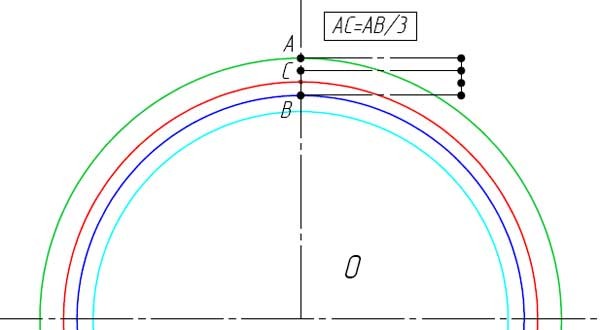
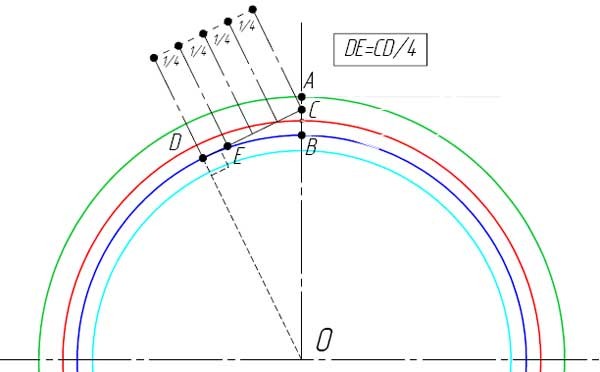
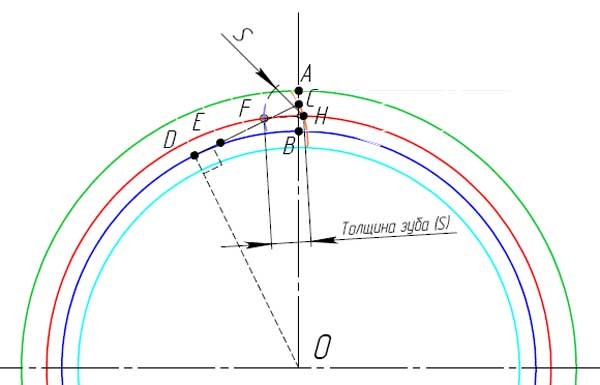
Модуль зубчатого колеса стандартизованы, что является основой для стандартизации других параметров зубчатых колёс. Основные формулы для расчета эвольвентного зацепления:Исходными данными для расчета как эвольвенты, так и зубчатого колеса являются следующие параметры: m - Модуль - часть диаметра делительной окружности приходящаяся на один зуб. Модуль - стандартная величина и определяется по справочникам. z - количество зубьев колеса. ? ("альфа") - угол профиля исходного контура. Угол является величиной стандартной и равной 20°. Делительный диаметр рассчитывается по формуле: Диаметр вершин зубьев рассчитывается по формуле: d1=D+2mДиаметр впадин зубьев рассчитывается по формуле: d2=D-2*(c+m)где с - радиальный зазор пары исходных контуров. Он определяется по формуле: с = 0,25mДиаметр основной окружности, развертка которой и будет составлять эвольвенту, определяется по формуле: d3 = cos ? * DОт автора. Я нашел в интернете полезную программку в Excel 2007. Это автоматизированная табличка для расчета всех параметров прямозубого зубчатого колеса. Итак, приступим к графическому построению профиля зубчатого колеса.
Вот и готов профиль зуба прямозубого зубчатого колеса. В этом примере использовались следующие параметры:
На этом первая часть урока является завершенной. Во второй части (видео) мы рассмотрим как применить полученный профиль зуба для построения модели зубчатого колеса. Для полного ознакомления с данной темой ("зубчатые колеса и зубчатые зацепления", а также "динамические сопряжения в SolidWorks") необходимо вместе с изучением этого урока изучать урок №24. Еще скажу пару слов о специальной программе, производящей расчет зубчатых колес и генерацию модели зубчатого колеса для SolidWorks. Это программа Camnetics GearTrax. А теперь переходим с следующей части урока.
Подавляющее большинство зубчатых передач, применяемых в технике, имеет зубчатые колеса с эвольвентным профилем. Эвольвента как кривая для формирования профиля зуба была предложена Л. Эйлером. Она обладает значительными преимуществами перед другими кривыми, применяемыми для этой цели, – удовлетворяет основному закону зацепления, обеспечивает постоянство передаточного отношения, нечувствительна к неточностям межосевого расстояния (что облегчает сборку), наиболее проста и технологична в изготовлении, легко стандартизируется (что особенно важно для такого распространенного вида механизмов как зубчатые передачи). На следующем видео хорошо показан пример эвольвентного зацепления зубчатых колес Эвольвента – это траектория движения точки, принадлежащей прямой, перекатывающейся без скольжения по окружности. Данная прямая называется производящей прямой, а окружность, по которой она перекатывается – основной окружностью (рисунок 38 а).
Эвольвента обладает следующими свойствами, которые используются в теории зацепления:
Положение любой точки на эвольвенте может быть однозначно охарактеризовано диаметром окружности, на которой она расположена, а также характерными для эвольвенты углами: углом развернутости (обозначается ν ), углом профиля ( α ), эвольвентным углом – inv α (рисунок 38 б). На рисунке 38 б показаны эти углы для произвольно выбранной на эвольвенте точки Y, поэтому они имеют соответствующий индекс:
То есть индекс показывает, на какой окружности находится рассматриваемая точка эвольвенты, поэтому для характерных окружностей используются индексы, приведенные выше. Например: α a1 – угол профиля эвольвенты в точке, лежащей на окружности вершин первого колеса; Рассмотрим свойства эвольвенты. Первое свойство имеет строгое математическое доказательство, однако в рамках данного короткого курса оно не приводится. Так как при формировании эвольвенты производящая прямая перекатывается по основной окружности без скольжения, то в данный момент времени она вращается вокруг точки N (N – мгновенный центр скоростей), описывая бесконечно малую дугу окружности, которая и определяет кривизну эвольвенты в данной точке. Т.е. отрезок NY – это радиус кривизны эвольвенты в точке Y (NY= ρ Y). Но отрезок NY в точности равен дуге NY0 (это та же дуга только вытянутая в прямую линию). Таким образом, имеем:
Чем больше радиус основной окружности, тем больше радиус кривизны эвольвенты в любой ее точке (то есть форма эвольвенты действительно определяется величиной радиуса основной окружности). Второе свойство также легко просматривается. Так как N – мгновенный центр скоростей, то скорость точки Y перпендикулярна радиусу NY. Но скорость точки, движущейся по криволинейной траектории, направлена по касательной к этой траектории – в данном случае по касательной к эвольвенте в точке Y. Перпендикуляр к касательной – есть нормаль, поэтому прямая YN с одной стороны является нормалью к эвольвенте в точке Y, с другой стороны является касательной к основной окружности (как производящая прямая, перекатывающаяся по основной окружности). То, что точка N является центром кривизны эвольвенты в точке Y, показано при рассмотрении первого свойства. Запишем некоторые зависимости, которые используются в дальнейшем при изучении геометрии эвольвентного зацепления (получаются из рассмотрения рисунка 38 б):
Третье свойство эвольвенты очевидно из рисунка 38а. Действительно, если на производящей прямой взять две точки (А и В), то они будут описывать две совершенно одинаковых эвольвенты, причем, как бы не перемещалась производящая прямая, расстояние между этими точками не изменяется (AiBi = Const). Т.е. действительно это эквидистантные (равноотстоящие друг от друга) кривые. Но, самое важное, что это расстояние AiBi равно расстоянию между этими эвольвентами, измеренному по дуге основной окружности:
Признаком того, что два криволинейных профиля касаются (а не пересекаются), является наличие у них в точке контакта общей нормали. В связи с этим контакт двух эвольвентных профилей происходит на общей касательной к основным окружностям N1N2 (рисунок 39), которая одновременно будет являться общей нормалью к этим профилям в точке их касания в любой момент времени (на основании второго свойства эвольвенты).
Геометрическое место точек контакта профилей, которое они занимают в процессе работы пары зубьев, называется линией зацепления. Таким образом, в эвольвентной передаче линией зацепления является прямая N1N2 (общая касательная к основным окружностям). На рисунке 39 а показано зацепление двух эвольвентных профилей в разные моменты времени. В обоих положениях прямая N1N2 является общей нормалью к этим касающимся профилям и проходит через полюс зацепления W (мгновенный центр относительного вращения). Это, с одной стороны показывает, что эвольвентные профили удовлетворяют основному закону зацепления, с другой стороны обеспечивают постоянство передаточного отношения, т.к. полюс зацепления не меняет своего положения в процессе работы пары (отношение O2W/O1W остается постянным). С изменением межосевого расстояния будет меняться только положение линии зацепления, но вся картина зацепления останется такой же, т.е. по-прежнему будет сохраняться основной закон зацепления, величина и постоянство передаточного отношения. Это очень важное свойство эвольвентного зацепления, т.к. позволяет вписывать передачу в разные межосевые расстояния, что особенно важно при проектировании коробок скоростей, планетарных и дифференциальных механизмов. Передача оказывается малочувствительной к неточностям межосевого расстояния, что позволяет снизить требования к точности сборки. Угол между линией зацепления и общей касательной к начальным окружностям в полюсе называется углом зацепления. Угол зацепления, угол профиля на начальной окружности первого колеса и угол профиля на начальной окружности второго колеса равны между собой (αw1=αw2=αw) , поэтому все они обозначаются одинаково – αw (без числового индекса – см. рисунок 39 а). Отрезок N1N2 называется теоретической линией зацепления. На этом участке происходит нормальная работа двух неограниченных эвольвент. В реальной передаче эвольвенты ограничены («обрезаны») окружностями вершин, поэтому вся работа пары происходит на участке линии зацепления P1P2, заключенном между окружностями вершин (рисунок 39б). Отрезок P1P2 называется рабочей (активной) частью линии зацепления (иногда называют просто «рабочая линия зацепления», или «активная линия зацепления»). На рисунке 39б показано два положения одной и той же пары: в начале зацепления (зуб ведомого колеса работает своей вершиной, зуб ведущего колеса – нижней рабочей точкой профиля Р1), и в конце зацепления (зуб ведущего колеса работает своей вершиной и в следующий момент выйдет из зацепления, зуб ведомого колеса работает своей нижней рабочей точкой профиля Р2). Примечание: здесь термин «нижняя» или «верхняя» точка относится к положению точек относительно основной окружности, независимо от того, как эти точки располагаются одна относительно другой в пространстве. Из двух рассматриваемых точек профиля «нижней» будет та, которая располагается ближе к основной окружности. При увеличении радиуса основной окружности до бесконечности радиус кривизны эвольвенты в любой ее точке также становится бесконечно большим, т.е. основная окружность и эвольвента превращаются в прямые линии. Эвольвентное зубчатое колесо превращается в зубчатую рейку с прямолинейным профилем зуба. Таким образом, рейка с прямолинейным профилем зуба представляет собой частный случай эвольвентного зубчатого колеса и обладает всеми его свойствами, т.е. может работать с любым эвольвентным колесом (при одном и том же модуле) без нарушения основного закона зацепления. При этом вращательное движение колеса преобразуется в поступательное движение рейки или поступательное движение рейки преобразуется во вращательное движение колеса с соблюдением постоянства передаточного отношения. Т.к. зубчатая рейка с прямолинейным профилем зуба с одной стороны имеет простые формы и легко задать размеры ее элементов, с другой стороны представляет собой эвольвентное зубчатое колесо, то ее параметры положены в основу стандартизации эвольвентных зубчатых колес. Стандартная зубчатая рейка называется исходным контуром (рисунок 40а).
Имеется несколько стандартов на исходные контуры, учитывающие специфику некоторых видов передач (мелкомодульных, конических и т.д.). В основном используются параметры, определенные ГОСТ 13 755 – 81. В соответствии с этим стандартом исходный контур имеет следующие параметры:
Приведенные коэффициенты являются безразмерными величинами. Абсолютное значение какого-либо размера получается умножением соответствующего коэффициента на модуль (Например: высота головки зуба ha=ha * ∙m; величина радиального зазора c = c*∙m и т. д.). Таким образом, форма зуба остается постоянной, а абсолютные размеры определяются модулем (т.е. модуль является как бы коэффициентом пропорциональности). По высоте зуб исходного контура делится на головку и ножку. Это деление осуществляется делительной прямой. Делительная прямая рейки – это прямая, на которой толщина зуба равна ширине впадины (рисунок 40б). Высота ножки зуба несколько больше головки для обеспечения радиального зазора между вершинами зубьев одного колеса и окружностью впадин другого после сборки передачи. Стандартные параметры исходного контура на эвольвентное колесо «переносятся» через делительную окружность (на делительной окружности шаг равен стандартному шагу исходного контура p= π ∙ m, угол профиля равен углу профиля исходного контура α = 20 0 ).  CC BY Аннотация научной статьи по механике и машиностроению, автор научной работы — Андросов С. П., Браилов И. Г.Определены зависимости, выраженные параметрическими векторными функциями , описывающие переходную поверхность зубьев прямозубых и косозубых цилиндрических колес. Похожие темы научных работ по механике и машиностроению , автор научной работы — Андросов С. П., Браилов И. Г.FILLET SURFACE OF CYLINDRICAL GEARSThis paper deals with the relations, expressed by parametric vector functions, describing fillet surface of straight and helical cylindrical gear tooth are presented. Текст научной работы на тему «Переходная поверхность зуба цилиндрических зубчатых колес»С.П. Андросов, И.Г. Браилов ПЕРЕХОДНАЯ ПОВЕРХНОСТЬ ЗУБА ЦИЛИНДРИЧЕСКИХ Определены зависимости, выраженные параметрическими векторными функциями, описывающие переходную поверхность зубьев прямозубых и косозубых цилиндрических колес. Зубчатое колесо, векторная функция, поверхность зуба, станочное зацепление S.P. Androsov, I.G. Brailov FILLET SURFACE OF CYLINDRICAL GEARS This paper deals with the relations, expressed by parametric vector functions, describing fillet surface of straight and helical cylindrical gear tooth are presented. Gear tooth, vector function, tooth surface, machine mesh Вопросы геометрии и кинематики цилиндрических косозубых передач требуют рассмотрения в пространственном отображении. В таких передачах, с учетом винтовой формы зубьев, условия зацепления сопряженной пары в торцевых сечениях по длине зубчатого венца различные [1]. В связи с этим необходимо рассматривать боковую поверхность зуба, не ограничиваясь только профилем зуба в торцевом сечении. В пространственном отображении требуется рассматривать и сложные многопараметрические процессы зубообработки инструментами червячного типа. Это в первую очередь относится к вопросам моделирования процессов формообразования зубьев зубчатых колес [2]. Как известно, боковая поверхность зубьев зубчатых колес состоит из двух частей: эвольвентной цилиндрической и переходной. Переходная поверхность соединяет эвольвентную поверхность зуба с поверхностью впадин. В торцевом сечении часть профиля зуба, расположенную в пределах его переходной поверхности, называют переходной кривой. В зависимости от способа изготовления зубьев зубчатых колес переходная кривая может быть очерчена различно: по окружности, по удлиненной и укороченной эвольвентам, по эпициклоиде и другим кривым [1]. Данная работа посвящена описанию переходной поверхности зуба цилиндрических зубчатых колес векторными функциями в параметрах станочных систем. Формообразование при зубофрезеровании методом обката происходит в станочном зацеплении, в процессе которого инструмент реечного типа формирует на нарезаемом колесе зубья с определенной геометрией и размерами. На рис. 1 приведены параметры исходного контура производящей рейки, которые определяют геометрию переходной поверхности зуба колеса: m - модуль зуба; h a - коэффициент высоты зуба: с - коэффициент радиального зазора; ра0 - радиус скругления головки зуба; а0 - угол профиля. В статье авторами рассматривается переходная поверхность зуба, имеющая в торцевом сечении профиль в виде окружности (рис. 2). Такая переходная поверхность формируется при нарезании зубчатого колеса с положительным смещением исходного контура на величину: где х - коэффициент смещения. Значение коэффициента смещения х определяется из соотношения [3]: к* а т + с * т - х т = ра0 . (2) Рис. 1 Параметры исходного контура производящей рейки Кривая 1М2 (рис. 2) представляет эвольвентную часть профиля зуба колеса, а участок МЬ - переходную часть профиля. Сопряжение частей профиля происходит в граничной точке Ь по касательной, проведенной к обеим его частям. Центр скругления О і переходной кривой М>Ь расположен на начальной прямой 2. Рис. 2. Формирование переходной кривой: - радиус основного цилиндра; ^- радиус цилиндра впадин; Ra - радиус цилиндра вершин; Rw - радиус начального цилиндра 3; М0М2 - эвольвента; NN - линия зацепления; Р - полюс зацепления; ада - угол зацепления; f - координата центра скругления О1 переходной кривой в глобальной системе координат Х0У2; 1 - средняя линия рейки; Х101У121 - локальная система координат, жестко связанная с исходным контуром производящей рейки В любой момент формирования переходной кривой контактная нормаль проходит через центр скругления Оі и полюс станочного зацепления Р [3]. Следовательно, в рассматриваемом случае центр Оі и полюс Р совпадают. Координата / центра скругления Оі переходной кривой в системе координат Х0У2 равняется радиусу начального цилиндра зубчатого колеса. Величина радиуса рао (рис. 3) вычисляется из соотношения: Переходная кривая М\Ь в торцевом сечении прямозубого колеса в локальной системе координат (рис. 4) описывается векторной функцией: где у - угол поворота радиуса радиуса рао . Ра о вт у Ра0 С0*Г - вектора гок. Модуль вектора гок равен значению Рис. 3. Определение значения радиуса ра0 В глобальной системе координат Х0У2 колеса вектор гпк переходной кривой в торцевом сечении колеса, восстановленный в точку М, запишется: где [М] - матрица параллельного переноса системы координат; гол - вектор переноса локальной системы координат ХІ01У121. Или в координатной форме: "1 о о" " о" Ра о Г " Рао *ІПГ " г = п. к о 1 о / + Ра о С0*У = / + Рао С0*У Произвольная точка М' (рис. 4) переходной поверхности прямого зуба колеса описывается вектором где гсм - вектор смещения, направленный по оси 02 колеса. В координатной форме вектор г имеет вид: где V- скорость перемещения конца вектора г вдоль оси 0Z; I - время перемещения. Рис. 4. Переходная поверхность прямого зуба Для винтового зуба косозубого колеса необходимо учитывать, что каждая точка переходной кривой все время поворачивается в плоскости Х0У на величину угла фі (рис. 5). Текущий параметрический угол ф1 изменяется в пределах от своего нулевого значения до значения ф1тах , которое он принимает на тыльном торцевом сечении зубчатого колеса. Величина ф1тах определяется по формуле: где Ъ - ширина зубчатого венца колеса; Рь - угол наклона линии зуба на основном цилиндре. В результате, после нахождения координат точки М' переходной кривой в произвольном ее положении, необходимо вектор г , определяемый по формуле (8), повернуть на угол ф1 путем умножения на матрицу [М1]. В общем виде векторная функция винтовой переходной поверхности запишется: Г =[М 1 ](гп.к + гсм) , (11) соб (р1 біп (р1 о - біп р1 собр1 о Рао ЗІПЇ / + Рао С0*Г Рис. 5. Переходная поверхность косого зуба В выражении (12) максимальное значение координаты вектора г по оси 02 в принятой системе равняется по модулю ширине зубчатого венца где а - параметр, характеризующий движение по винтовой линии вдоль оси 02 колеса. Значение параметра а определяется отношением: Н - шаг винтовой линии, ю - угловая скорость вращения проекции вектора г на плоскость Х0У вокруг оси 02. С учетом преобразований выражения (12), векторная функция боковой переходной поверхности зуба косозубого колеса опишется формулой: Г = f СОБ^! +раоСОЪ(у+ф1 ) . (15) В результате вектор г , восстановленный в точку М' винтовой переходной поверхности (рис. 5), имеет относительно вектора переходной кривой в лицевом торцевом сечении два аффинных преобразования: поступательное перемещение вдоль оси 02 зубчатого колеса и поворот относительно этой оси. В заключение отметим, что запись уравнений переходной поверхности прямых и винтовых зубьев зубчатых колес в координатной форме, полученных авторами, позволяет любые пространственные преобразования, которые имеют место при зубофрезеровании. Пространственное описание боковых поверхностей зубьев дает возможность моделировать различные эксплуатационные и технологические процессы и определять их параметры. Например, определение таких параметров, как положение нормали в любой точке поверхности, необходимого для расчета сил резания при зубофрезеровании, расстояний от рассматриваемой точки поверхности до оси колеса и оси симметрии зуба, используемых при исследовании изгибной прочности зубьев, площади поверхности и других. 1. Гавриленко В. А. Основы теории эвольвентной зубчатой передачи. М.: Машиностроение, 1969. 432 с. 2. Браилов И.Г., Андросов С.П. К вопросу моделирования зубофрезерования // Наука и производство - 2009: материалы Международ. науч. - практ. конф. в 2 ч. Брянск: БГТУ, 2009. Ч. 2. С. 16-18. 3. Болотовский И.А., Гурьев Б.И., Смирнов В.Э., Шендерей Б.И. Цилиндрические эвольвентные зубчатые передачи внешнего зацепления. М.:Машиностроение, 1974. 160 с. Андросов Сергей Павлович - кандидат технических наук, доцент кафедры «Сопротивление материалов» Омского государственного технического университета Браилов Иван Григорьевич - доктор технических наук, профессор кафедры «Прикладная механика» Сибирской государственной автомобильно-дорожной академии, г. Омск Androsov Sergey Pavlovich - Candidate of Technical Sciences, Assistant Professor of the Department “Resistance of Materials”, Omsk State Technical University Brailov Ivan Grigoryevich - Doctor of Technical Sciences, Professor of the Department “Applied Mechanics”, Siberian Automobile - Road Academy, Omsk Ст(лтья поступили вредюкцию 11.01.2011, принят(л к опубликовсхнию 27.07.2011 Сопряженные поверхности – поверхности, которые постоянно или с определенной периодичностью входят в зацепление друг с другом. По отношению к начальным окружностям сопряженные поверхности могут занимать различные положения. Правильным положением является то, которое удовлетворяет основной теореме зацепления, теореме о мгновенном передаточном отношении, которое формулируется следующим образом: Общая нормаль, проведенная в точке контакта сопряженных поверхностей, проходит через линию центров О1О2 и делит эту линию на части, обратно пропорциональные отношению угловых скоростей. "-" если зацепление внешнее; "+" если зацепление внутреннее; Сопряженные профили должны удовлетворять следующим требованиям: 1. быть простыми в изготовлении (технологичными); 2. иметь высокий КПД. Таким требованиям удовлетворят эвольвентные профили. 4.3 Эвольвента и ее свойства. Эвольвента образуется путем перекатывания производящей прямой KyNy без скольжения по основной окружности радиуса rb . Радиус произвольной окружности – ry . ONy || t t Из треугольника ONyKy следует, что Т.к. KyNy перекатывается без скольжения по основной окружности, то Уравнения (1) И (2) являются уравнениями эвольвенты в параметрической форме. a у – угол профиля эвольвенты для точки Ку , лежащей на произвольной окружности. a – угол профиля эвольвенты для точки К , лежащей на делительной окружности радиуса r . Угол профиля эвольвенты для точки Кb , лежащей на основной окружности, равен нулю: a b =0 . Свойства эвольвенты . 1. Форма эвольвенты зависит от радиуса основной окружности. При стремлении rb ,эвольвента превращается в прямую линию (пример рейка). 2. Производящая прямая KyNy является нормалью к эвольвенте в данной тоске. 3. Эвольвента начинается от основной окружности. Внутри основной окружности точек эвольвенты нет. 4.4 Элементы эвольвентного зубчатого колеса (рис.8-86). Делительной окружностью называется окружность стандартных шага р , модуля m и угла профиля a . Шаг – расстояние между одноименными точками двух соседних профилей зубьев, измеренные по дуге соответствующей окружности. Модулем называется часть диаметра делительной окружности, приходящаяся на один зуб. Модуль m, [мм] – стандартная величина и определяется по справочникам, исходя из трех рядов: 1 ряд – наиболее предпочтительный; 2 ряд – средней предпочтительности; 3 ряд – наименее предпочтительный. Модуль является масштабным фактором высоты зуба. Чем больше модуль, тем выше высота зуба, тем больше плечо силы P, вызывающей изгибные напряжения у основания зуба. Угол профиля – угол между касательной к эвольвенте в данной точке и радиус-вектором этой точки (см. чертеж эвольвенты). Угол профиля для точки, лежащей на делительной окружности, является величиной стандартной и равной 20 о (хотя лучше 25 о ). 1. Основные расчетные зависимости для определения параметров эвольвентного зубчатого колеса. 1. Число зубьев z; 2. Модуль m; 3. Ширина венца b; 4.Высота зуба h; 5. Диаметры зубчатого колеса: делительный d=mz; вершин зубьев da; впадин df ; сновной db; произвольный dy; 6. Окружной шаг: делительный p=πm; по произвольной окружности Py; Окружная толщина зуба S, Sa; окружная толщина впадины e; 7. Угловой шаг τ=360˚/z; угловая толщина зуба 2 ψ; 8. Угол профиля зуба на делительной окружности α ; 9. Эвольветные углы: inv αy ; inv αa;10. Радиус кривизны перехода профиля ρf. Рис.8-86. Элементы и основные параметры эвольвентного прямозубого колеса. Из (1) следует, что радиус делительной окружности модуль по ГОСТу определяется 2 p . r = p . z à p = p . m ( 4 ) по основной окружности a y = 0 à pb = p cos 20 o (7) 2. Виды зубчатых колес. s = + Δ . m (9) где Δ – коэффициент изменения толщины зуба . В зависимости от знака коэффициента Δ различают виды зубчатых колес: 1. Δ = 0 s = e = p/2 нулевое зубчатое колесо; 2. Δ > 0 s > e положительное зубчатое колесо; 3. Δ отрицательное зубчатое колесо. 4. Эвольвентная зубчатая передача и ее свойства (рис. 11-86). aw - межосевое расстояние; αw - угол зацепления; ym - воспринимаемое смещение; C - радиальный зазор; g -длина линии зацепления N1N2 ; gα - длина активной линии зацепления; Р - полюс зацепления; rw1, rw2- радиусы начальных окружностей; φα1 - угол торцевого перекрытия зубчатого колеса. Рис.11-86. Элементы и основные параметры эвольвентной зубчатой передачи Эвольвентную зубчатую передачу составляют, как минимум, из 2-х зубчатых колес, при этом в рассмотрение вводится две начальные окружности радиусами rw1 и rw2 . Меньшее зубчатое колесо в обычной понижающей зубчатой передаче называется шестерня . Вместо производящей прямой здесь вводится в рассмотрение линия зацепления N1N2 , которая одновременно касается 2-х основных окружностей rb1 и rb2 . Линия зацепления является геометрическим местом точек контакта сопряженных эвольвентных профилей. В точке В1 пара эвольвент, которые в данный момент времени контактируют в точке К , вошли в зацепление. В точке В2 эта же пара эвольвент из зацепления выходят. На линии зацепления N1N2 все взаимодействующие эвольвенты при зацеплении касаются друг друга. Вне участка N1N2 эвольвенты пересекаются, и если такое случится, то произойдет заклинивание зубчатого колеса (9-86). Рис.9-86. Интерференция эвольвет при внешнем зацеплении а) интерференция эвольвет Для передачи, составленной из нулевых зубчатых колес a w =20 o Для передачи, составленной из положительных з. к. a w >20 o Для передачи, составленной из отрицательных з. к. a w o c=c * . m - радиальный зазор , величина стандартная, необходим для нормального обеспечения смазки. c * - коэффициент радиального зазора , по ГОСТ c * =0.25 (c * =0.35). Расстояние между делительными окружностями у . m – это воспринимаемое смещение. у – коэффициент воспринимаемого смещения , он имеет знак, и в зависимости от знака различают: 1. у=0 у . m=0 – нулевая зубчатая передача; 2. у>0 у . m>0 – положительная зубчатая передача; 3. у . m – отрицательная зубчатая передача; Свойства эвольвентного зацепления . 1. Эвольвентное зацепление молочувствительно к погрешностям изготовления, т.е. при отклонении межосевого расстояния от номинала передаточное отношение зубчатой передачи не изменится. 2. Линия зацепления N1N2 является общей нормалью к сопряженным эвольвентным профилям. 3. Контакт эвольвент осуществляется только на линии зацепления. Читайте также:
|